Suara.com - Perusahaan teknologi Nvidia memperkenalkan portofolio teknologi untuk meningkatkan pengembangan robot humanoid.
Termasuk model dasar robot humanoid terbuka yang dinamai Isaac GR00T N1.
Menurut siaran pers perusahaan di laman resminya, model dasar tersebut dapat disesuaikan sepenuhnya untuk penalaran dan keterampilan humanoid yang digeneralisasi.
"Era robotika generalis telah tiba," kata pendiri dan CEO Nvidia Jensen Huang, Selasa 18 Maret 2025
"Dengan Nvidia Isaac GR00T N1 dan kerangka kerja pembelajaran robot serta pembuatan data baru, pengembang robotika di mana pun akan membuka batas baru di era AI," katanya.
Perusahaan menyampaikan bahwa GR00T N1 yang kini tersedia adalah yang pertama.
Dari serangkaian model yang sepenuhnya dapat disesuaikan yang akan dilatih terlebih dahulu oleh Nvidia dan dirilis kepada pengembang robotika di seluruh dunia.
Sebagaimana dikutip dalam siaran TechCrunch, perusahaan dalam ajang GTC 2025 menyampaikan bahwa GR00T N1 adalah model "generalis" yang dilatih menggunakan data sintetis dan data nyata.
Dalam video pengenalan GR00T N1, Nvidia menyebutkan bahwa model ini memiliki arsitektur sistem ganda untuk berpikir cepat dan lambat, yang terinspirasi oleh proses kognitif manusia.
Baca Juga: Buku The Wild Robot: Bagaimana Teknologi dan Alam Bisa Saling Berdampingan
Perusahaan menyampaikan bahwa Sistem 1 adalah model tindakan berpikir cepat, yang mencerminkan refleks atau intuisi manusia.
Sedangkan Sistem 2 adalah model berpikir lambat untuk pengambilan keputusan yang disengaja dan metodis.
Dengan dukungan model bahasa visi, Sistem 2 bernalar tentang lingkungannya dan instruksi yang diterimanya untuk merencanakan tindakan.
Sistem 1 kemudian menerjemahkan rencana ini menjadi gerakan robot yang tepat dan berkelanjutan.
Menurut Nvidia, GR00T N1 dapat dengan mudah digeneralisasi untuk seluruh tugas umum, seperti menggenggam.
Memindahkan objek dengan satu atau kedua lengan, dan memindahkan barang dari satu lengan ke lengan lainnya.
Atau melakukan tugas multilangkah yang memerlukan konteks panjang dan kombinasi keterampilan umum.
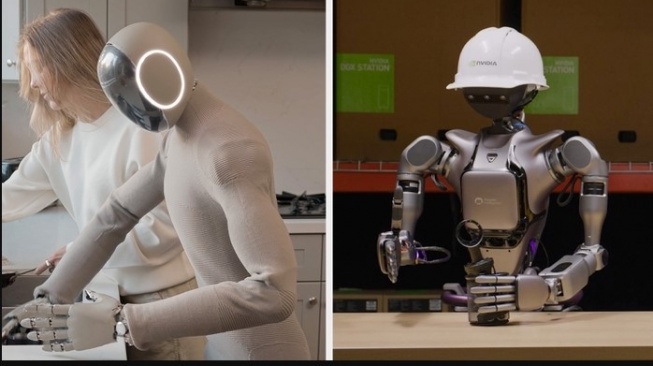
Dalam sesi pidato kunci di GTC 2025, Jensen Huang mendemonstrasikan robot humanoid dari perusahaan 1X yang bisa melakukan pekerjaan rumah tangga.
Robot humanoid itu menggunakan GR00T N1 sebagai dasar pengembangan.
CEO 1X Technologies Bernt Bornich mengatakan bahwa model GR00T N1 dari Nvidia menghadirkan terobosan besar bagi penalaran dan keterampilan robot.
"Dengan jumlah data pasca-pelatihan yang minimal, kami dapat menerapkannya sepenuhnya pada NEO Gamma, melanjutkan misi kami untuk menciptakan robot yang bukan alat, tetapi pendamping yang dapat membantu manusia dengan cara yang bermakna dan tak terukur," katanya.
"Masa depan humanoid adalah tentang kemampuan beradaptasi dan terus belajar," kata dia.
Selain 1X, pengembang humanoid yang telah mendapat akses awal ke GR00T N1 meliputi Agility Robotics, Boston Dynamics, Mentee Robotics, dan NEURA Robotics.
GR00T N1 tersedia sebagai sumber terbuka. Model dasar ini dapat diakses melalui Hugging Face dan GitHub.
Bersamaan dengan model tersebut, Nvidia merilis kerangka kerja simulasi dan cetak biru untuk menghasilkan data pelatihan sintetis.
Pengembang dan peneliti dapat melakukan pasca-pelatihan GR00T N1 dengan data nyata atau sintetis untuk mengembangkan robot humanoid spesifik.
GR00T N1 Memajukan Komunitas Pengembang Humanoid
Model dasar GR00T N1 memiliki arsitektur sistem ganda, yang terinspirasi oleh prinsip-prinsip kognisi manusia.
"Sistem 1" adalah model tindakan berpikir cepat, yang mencerminkan refleks atau intuisi manusia.
"Sistem 2" adalah model berpikir lambat untuk pengambilan keputusan yang disengaja dan metodis.
Didukung oleh model bahasa visi, Sistem 2 bernalar tentang lingkungannya dan instruksi yang telah diterimanya untuk merencanakan tindakan.
Sistem 1 kemudian menerjemahkan rencana ini menjadi gerakan robot yang tepat dan berkelanjutan.
Sistem 1 dilatih pada data demonstrasi manusia dan sejumlah besar data sintetis yang dihasilkan oleh platform NVIDIA Omniverse™.
GR00T N1 dapat dengan mudah digeneralisasi di seluruh tugas umum — seperti menggenggam, memindahkan objek dengan satu atau kedua lengan.
Memindahkan barang dari satu lengan ke lengan lainnya — atau melakukan tugas multilangkah yang memerlukan konteks panjang dan kombinasi keterampilan umum.
Kemampuan ini dapat diterapkan di seluruh kasus penggunaan seperti penanganan material, pengemasan, dan inspeksi.
Pengembang dan peneliti dapat melakukan pelatihan pasca-GR00T N1 dengan data nyata atau sintetis untuk robot humanoid atau tugas spesifik mereka.
Dalam pidato utamanya di GTC, Huang mendemonstrasikan robot humanoid 1X yang secara otomatis melakukan tugas merapikan rumah.
Menggunakan kebijakan pasca-pelatihan yang dibangun di GR00T N1. Kemampuan otonom robot tersebut merupakan hasil kolaborasi pelatihan AI antara 1X dan NVIDIA.