Sistem 1 kemudian menerjemahkan rencana ini menjadi gerakan robot yang tepat dan berkelanjutan.
Sistem 1 dilatih pada data demonstrasi manusia dan sejumlah besar data sintetis yang dihasilkan oleh platform NVIDIA Omniverse™.
GR00T N1 dapat dengan mudah digeneralisasi di seluruh tugas umum — seperti menggenggam, memindahkan objek dengan satu atau kedua lengan.
Memindahkan barang dari satu lengan ke lengan lainnya — atau melakukan tugas multilangkah yang memerlukan konteks panjang dan kombinasi keterampilan umum.
Kemampuan ini dapat diterapkan di seluruh kasus penggunaan seperti penanganan material, pengemasan, dan inspeksi.
Pengembang dan peneliti dapat melakukan pelatihan pasca-GR00T N1 dengan data nyata atau sintetis untuk robot humanoid atau tugas spesifik mereka.
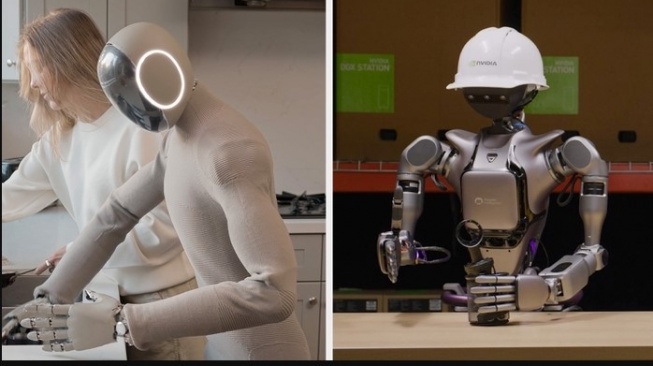
Dalam pidato utamanya di GTC, Huang mendemonstrasikan robot humanoid 1X yang secara otomatis melakukan tugas merapikan rumah.
Menggunakan kebijakan pasca-pelatihan yang dibangun di GR00T N1. Kemampuan otonom robot tersebut merupakan hasil kolaborasi pelatihan AI antara 1X dan NVIDIA.
Baca Juga: Buku The Wild Robot: Bagaimana Teknologi dan Alam Bisa Saling Berdampingan